Pneumatiska robotar möter AI
{kind=link}
Oavsett om vi griper, håller, vrider, berör, skriver eller trycker - i vardagen använder vi våra händer som en självklarhet för olika uppgifter. I det avseendet är den mänskliga handen med sin kombination av kraft, fingerfärdighet och fina motoriska färdighet ett naturligt mirakelverktyg.
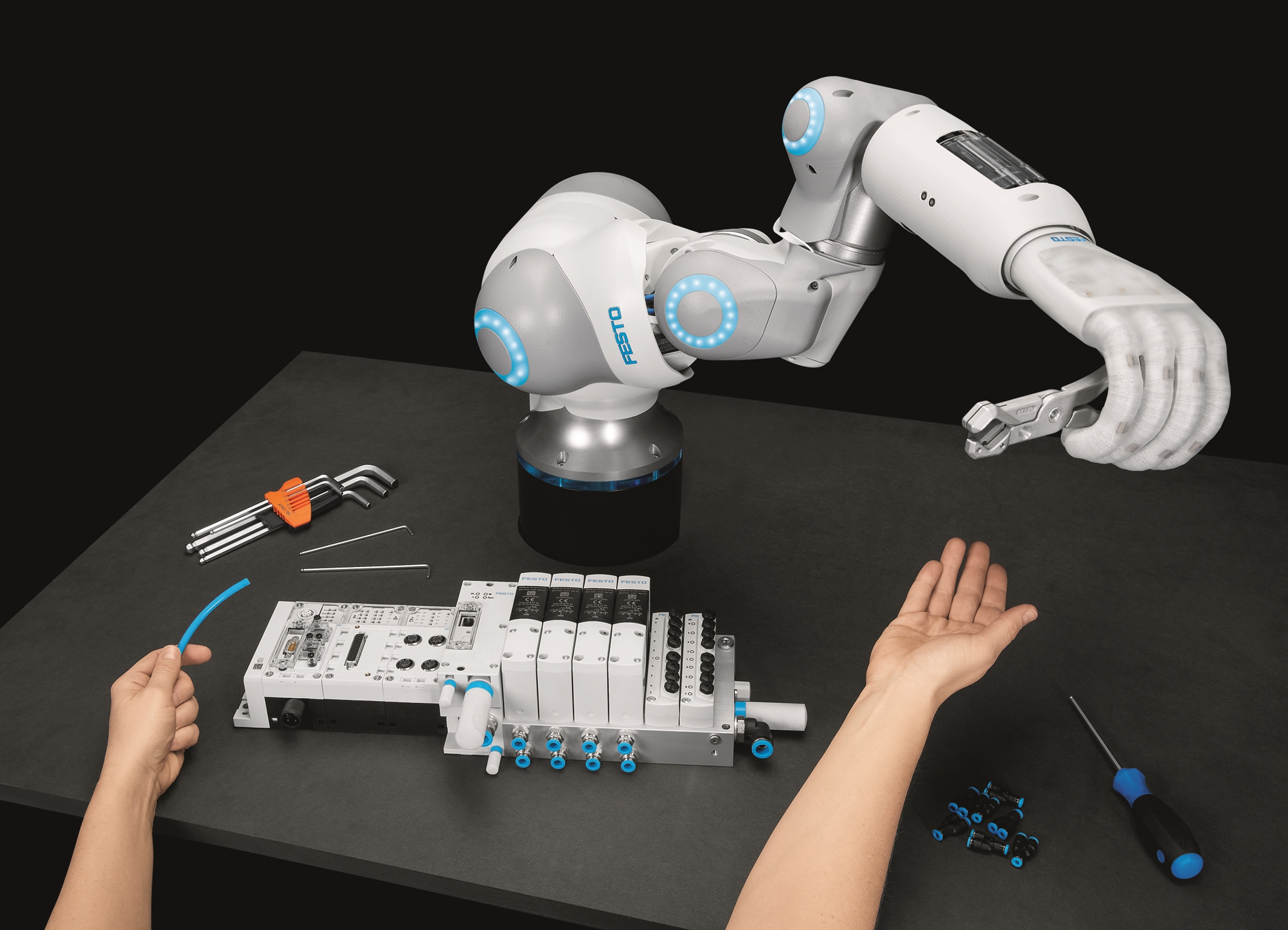
Vad kan vara mer naturligt än att utrusta robotar i gemensamma arbetsområden med ett gripdon som är utformat efter denna naturliga modell, och som löser olika uppgifter genom att lära via artificiell intelligens? Kombinerat med den pneumatiska lättviktsroboten BionicSoftArm, är framtidens koncept lämpliga för människa/robot-samarbete, skriver Festo i ett pressmeddelande.
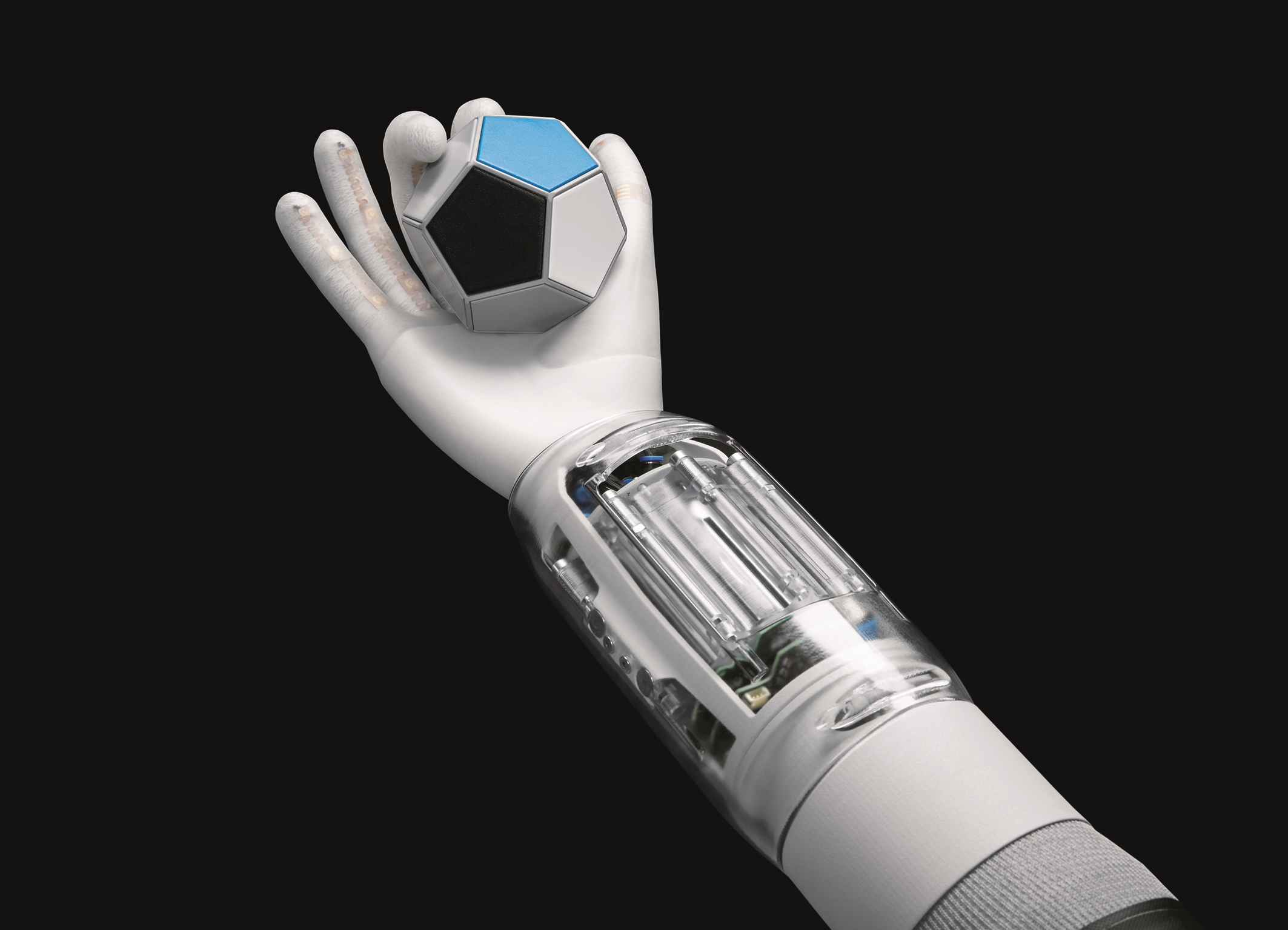
BionicSoftHand är pneumatiskt manövrerad så att den kan samarbeta säkert och direkt med människor. BionicSoftHands fingrar består av flexibla bälgkonstruktioner med luftkammare. Bälgarna är inneslutna i fingrarna av ett speciellt 3D textilhölje, som är vävt av både elastiska och hållfasta trådar.
Med hjälp av denna textil är det möjligt att bestämma exakt var strukturen ska expandera och generera kraft, och var den är förhindrad att expandera. Detta gör den lätt, flexibel, justerbar och känslig. Ändå kan den arbeta med stora krafter.
BionicSoftHand arbetar enligt metoden för “reinforcement learning”. Detta betyder att istället för att imitera en specifik handling så ges handen ett mål. Den använder test- och felmetoden för att uppnå sina mål. Baserad på erhållen feedback optimerar den gradvis sina handlingar tills uppgiften slutligen är framgångsrikt utförd.
Specifikt ska BionicSoftHand rotera en 12-sidig kub så att en tidigare definierad sida slutligen är vänd uppåt. Den nödvändiga rörelsestrategin lärs ut i en virtuell miljö med hjälp av en digital tvilling, som skapas med hjälp av data från en djupkänslig kamera och algoritmer för artificiell intelligens.
För att minimera slangdragningen i BionicSoftHand har utvecklarna konstruerat en liten, digitalt styrd ventilterminal som är monterad direkt på handen. Det innebär att slangarna för styrning av gripfingrarna inte behöver dras genom hela robotarmen. Således kan BionicSoftHand snabbt och enkelt anslutas och drivas med endast en slang för vardera till- och frånluft. Genom att proportionella piezoventiler används kan fingrarnas rörelser regleras exakt.
Den modulära roboten kan användas för en mängd olika applikationer beroende på design och det monterade gripdonet. Genom sin flexibla kinematik kan roboten samarbeta direkt och säkert med människor. Samtidigt gör kinematiken det enklare för den att anpassa sig till olika arbetsuppgifter på olika platser i produktionsmiljöer. Det eliminerar kostsamma säkerhetsanordningar såsom burar och ljusbarriärer, förkortar omställningstiden och möjliggör därmed flexibel användning – helt enligt adaptiv och ekonomisk produktion.